

In ARAIMFUSE project the objective is to develop the next steps of ARAIM (Advanced Receiver Autonomous Integrity Monitoring) for Rail, Maritime and UAS Sector. Next, an overview of the proposed evolutions for each sector is provided.
Rail Sector
For the Rail sector, the proposed evolution encompasses the integration of:
- ARAIM + SBAS + IMU/ Odometer
The high-level view of the proposed ARAIM Evolution for Rail is depicted in the following figure.
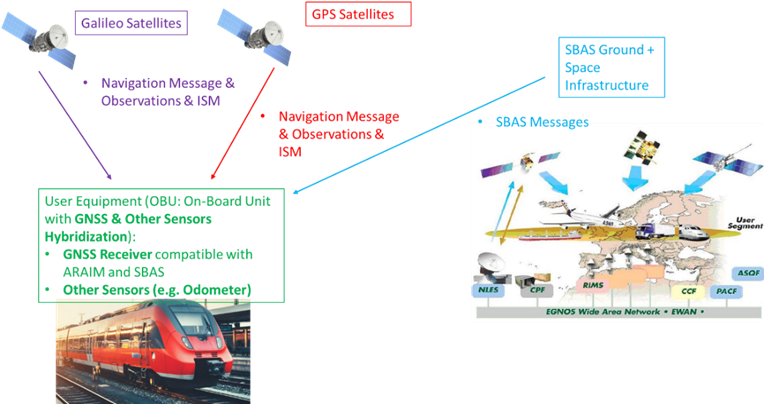
The train would be equipped with an On-Board Unit (OBU) including the hybridization of GNSS with Odometer comprising the following elements:
- A GNSS Receiver compatible with ARAIM and SBAS,
- An Odometer.
The Navigation and Observations from GNSS satellites (GPS + Galileo constellation with the possibility to include up to 4 constellations) would be processed by the on-board user equipment as well as the SBAS messages disseminated by EGNOS.
With the previous high-level design of the ARAIM Evolution for Rail, the following strengths would be exploited:
- Combination of SBAS with ARAIM, for taking advantage of:
- The SBAS corrections.
- The power of SBAS monitoring of System Level events.
- The use of ARAIM would then be more focused on the mitigation of the Local environmental effects.
- Hybridization with Odometer to improve availability against GNSS outages, better cope with Local Effects, etc.
- Allocation of integrity budget to the Along Track dimension to exploit the particularities of the movement in 1 dimension.
- Multipath and NLOS models for Urban Environment as worst case
- Sequential ARAIM approach
- Digital Maps
Maritime Sector
In the case of Maritime sector, the proposed evolutions are two: short-term evolution and long-term evolution.
Short-term evolution:
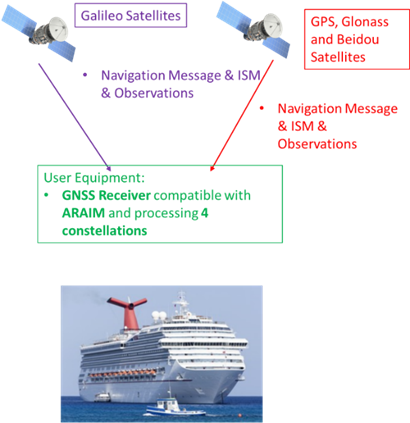
To comply with some Maritime applications in the short term and to support the ARAIM introduction in Maritime Standards, an ARAIM concept without major evolutions is proposed. In particular, the ARAIM concept proposed for the introduction in Maritime domain in the short term relies in the following pillars:
- Processing of 4 constellations: Galileo, GPS, GLONASS and BeiDou.
- Multipath Model for the Maritime domain.
- Hybridization with IMU is not proposed for the short term ARAIM concept for Maritime.
- Combination with SBAS is not considered for the short term ARAIM concept for Maritime.
The high-level view of the proposed short term ARAIM Evolution for Maritime is depicted in the following figure.
Long-term evolution:
For the Maritime sector, the proposed long-term evolution encompasses the integration of:
- ARAIM + SBAS + IMU.
The high-level view of the proposed long term ARAIM Evolution for Maritime is depicted in the following figure.
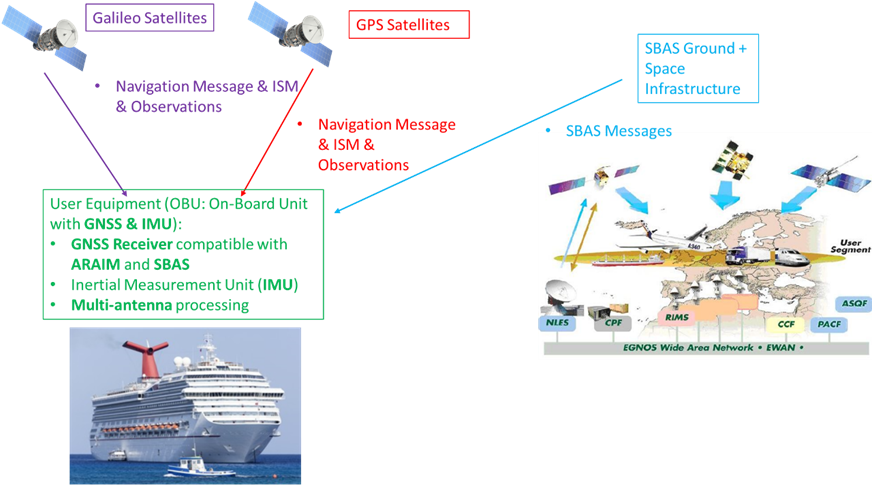
The ship would be equipped with a GNSS Receiver compatible with ARAIM and SBAS and IMU. Galileo satellites would broadcast within its Navigation Message the Integrity Support Message (ISM) and processed by the User equipment. The Navigation and Observations from GNSS satellites (GPS + Galileo constellation) would be processed by the user equipment as well as the SBAS messages disseminated by EGNOS.
With the previous high-level design of the ARAIM Evolution for Maritime the following strengths would be exploited:
- Combination of SBAS with ARAIM, for taking advantage of:
- The SBAS corrections.
- The power of SBAS monitoring of System Level events.
- It is foreseen an EGNOS V3 Maritime Service and for this reason, SBAS is an attractive option for the combination with ARAIM.
- The use of ARAIM would then be more focused on the mitigation of the Local environmental effects.
- To consider IMU as a completely independent sensor and not combining it with GNSS.
- Allocation of integrity budget to the horizontal dimension to exploit the particularities on the movement in the horizontal dimension.
- Multipath model for Maritime Environment,
- Good antenna location and multi-antenna solution.
UAVs Sector
In the case of UAVs sector, the proposed evolutions are two: short-term evolution and long-term evolution.
Short-term evolution:
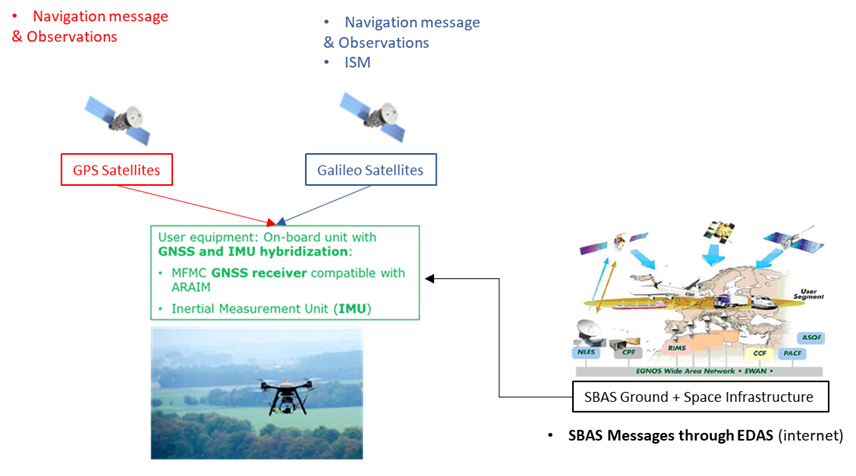
For this evolution:
- Corrections and integrity messages of EGNOS will be applied.
- PPP corrections are no implemented.
- The hybridization of the navigation filter will be based on the combination of IMU measurements with augmented GNSS measurements. These measurements are obtained from Galileo and GPS.
- The onboard equipment will obtain the corrections from EGNOS via the internet by means of the EDAS service.
- Differential corrections can be obtained from the EDAS system, improving upon the standalone GNSS measurements.
An overview of the architecture is given in the next figure:
Long-term evolution:
For the UAVs sector, the proposed long-term evolution encompasses the integration of:
- ARAIM + PPP (HAS) + IMU.
An overview of the architecture is depicted in the next figure:
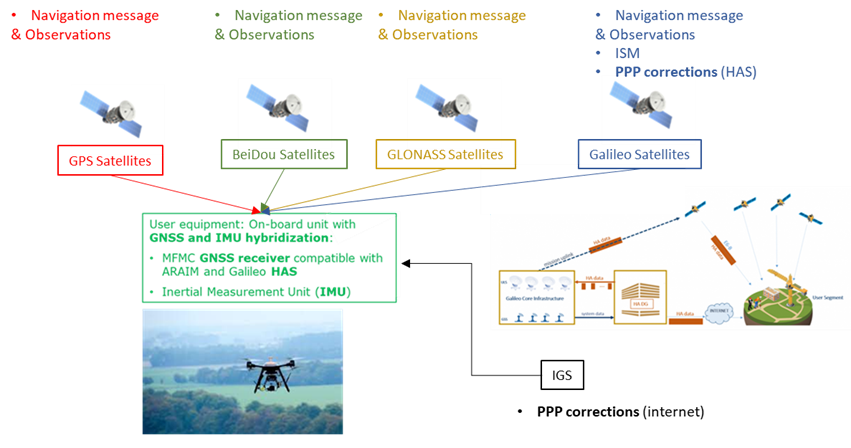
The proposed evolution of the ARAIM algorithm for UAV implementations consists of augmentation and extension of the GNSS signal by means of PPP through the High Accuracy Service (HAS) as well as hybridization with an Inertial Measurement Unit (IMU). This combination shall result in high accuracy PVT solutions in combination with tight integrity budgets associated with the demanding urban user environment. Furthermore, it is proposed to use more than two constellations.
With the previous high-level design of the ARAIM Evolution for UAVs the following strengths would be exploited:
- The incorporation of Precise Point Positioning (PPP) by means of the HAS, provides benefits in the form of:
- PPP corrections.
- Integrity monitoring through the dissemination of validity flags in the HAS signal.
- Multi frequency.
- Benefits of hybridization with an IMU:
- Higher frequency PNT output which will result in higher continuity and availability.
- Higher accuracy and tighter Protection Limits.
- Robustness to variations in GNSS signal quality, high user dynamics and to user environment
- More usable satellites in view will result in tighter integrity bounds and higher availability and continuity.