The following high-level ARAIM Evolution has been proposed to cover applications within the UAV User Sector for the short term:
- Multi-frequency, GPS and Galileo constellations GNSS measurements.
- Corrections and integrity messages of EGNOS will be applied (EGNOSS Data Access Service, EDAS).
- Hybridization with IMU.
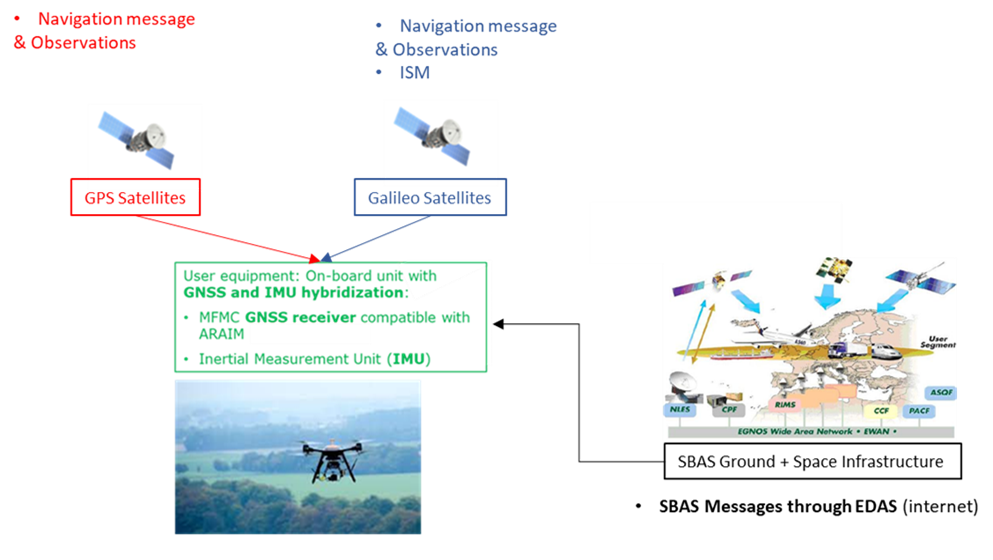
The hybridization of the navigation filter will be based on the combination of IMU measurements with augmented GNSS measurements. These measurements are obtained from Galileo and GPS. The onboard equipment will obtain the corrections from EGNOS via the internet by means of the EDAS service, which provides corrections and integrity for the GPS and Galileo constellations, when considering the v3 version of this service. Moreover, differential corrections can be obtained from the EDAS service, improving upon the standalone GNSS measurements. An overview of the architecture is given in the next figure.